
Final Presentation Attitude Control of Autonomous Ships Navigating in Ports
Last Updated: 05/11/2025 09:00 Created at: 05/11/2025 08:59
On October 31, 2025, Space Applications Services NS/SA and AnavS GmbH presented the results of NAVISP project EL1-055 “MAPP – Attitude Control of Autonomous Ships Navigating in Ports.”
The project aimed to develop a high-accuracy, multi-sensor positioning and attitude determination system for Maritime Autonomous Surface Ships (MASS), focusing on port approach, navigation, and docking. The system integrates GNSS-PPP, RTK, Visual, LiDAR, and IMU data using advanced filtering techniques (EKF, Particle Filter), with a strong emphasis on integrity monitoring.
The system was designed, implemented, and validated through real-world testing in Trieste and Palma de Mallorca, including:
- Development of a modular hardware and software architecture with ROS-based communication
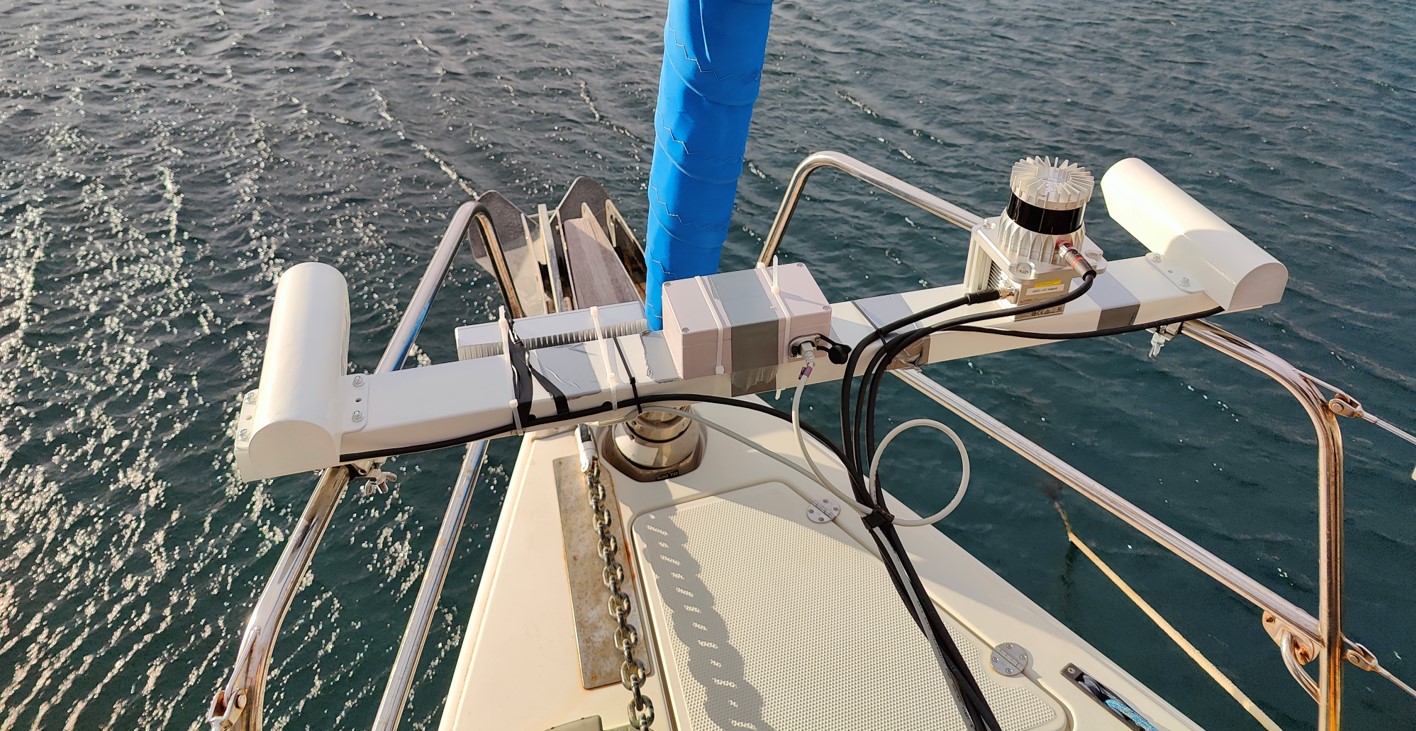
- Integration of GNSS, IMU, stereo cameras, and solid-state LiDAR
- Implementation of MHSS-based integrity schemes and fault detection mechanisms
- Evaluation of performance under GNSS outages and sensor faults
Key results include:
- Sub-meter position and orientation accuracy across all operational scenarios (RMSE as low as 0.108 m)
- Robustness against sensor dropouts and GNSS outages
- Successful fault detection and exclusion with 100% availability in port approach and navigation
- Protection Levels consistently overbounding position errors, though docking HAL (25 cm) was not met
- Real-time performance on embedded platforms validated
The project laid the foundation for a higher-TRL system to be pursued under NAVISP Element 2, targeting integration with ship navigation systems and testing on larger vessels.
The project was fully funded by NAVISP Element 1, which supports innovation in PNT technologies. The slides of the final presentation can be found here.