
Final Presentation Improved Location Mapping Using Imaging Radars, GNSS and Point-Cloud Registration
Last Updated: 07/08/2025 11:58 Created at: 28/07/2025 13:09
 On 28th July 2025, Provizio delivered the final presentation of the NAVISP EL2-203 “Improved Location Mapping Using Imaging Radars, GNSS and Point-Cloud Registration” project. The objective was to develop a radar-only odometry algorithm capable of maintaining accurate vehicle localization and perception when GNSS signals are lost, ensuring the continuity of safety-critical ADAS functions.
On 28th July 2025, Provizio delivered the final presentation of the NAVISP EL2-203 “Improved Location Mapping Using Imaging Radars, GNSS and Point-Cloud Registration” project. The objective was to develop a radar-only odometry algorithm capable of maintaining accurate vehicle localization and perception when GNSS signals are lost, ensuring the continuity of safety-critical ADAS functions.
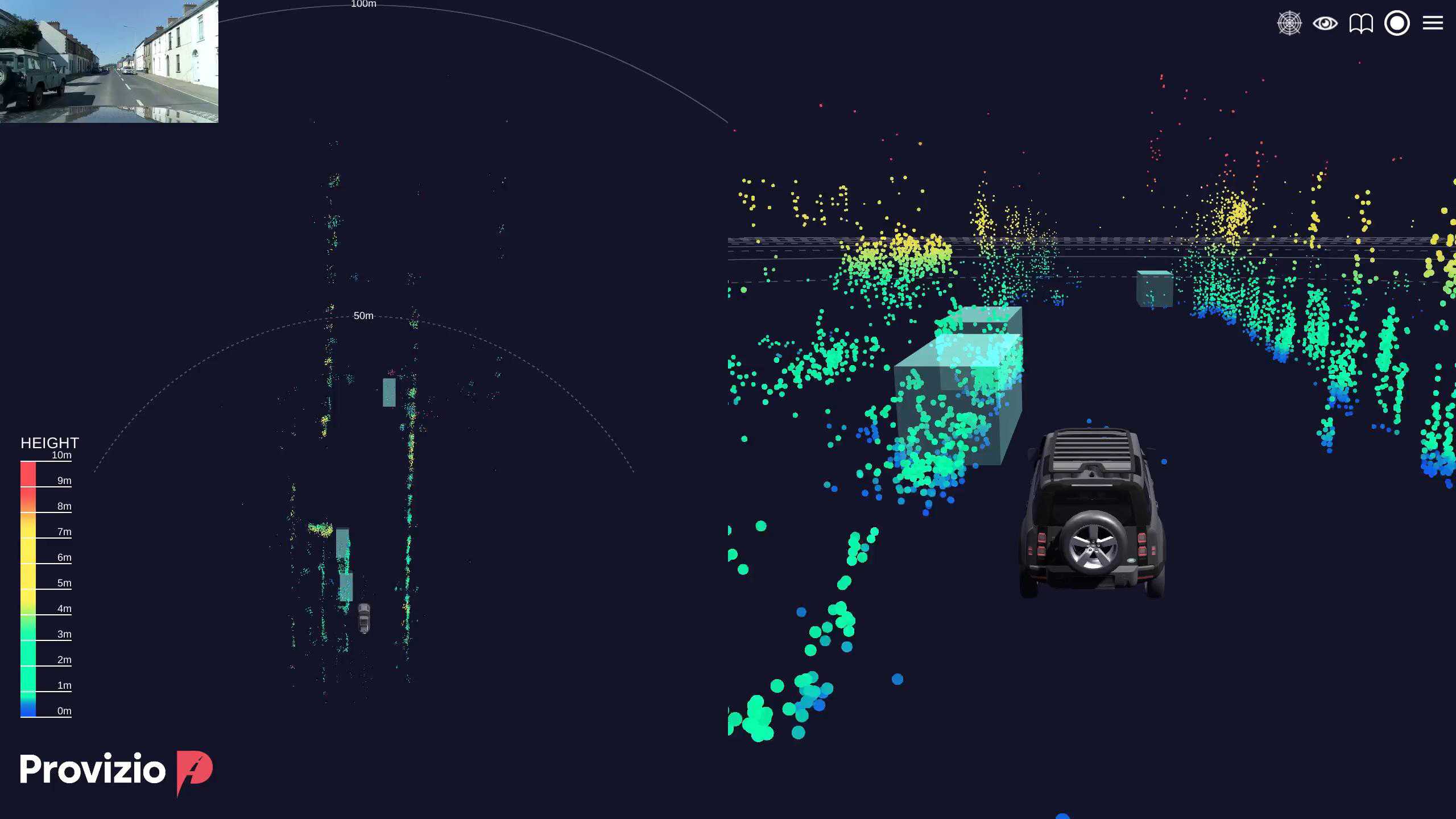
The team designed a scan-matching radar odometry algorithm using only radar point cloud data—without relying on IMUs or prior maps. They implemented adaptive Kalman filtering, dynamic search ranges, and error function optimization to estimate ego-motion in real time. The algorithm was validated through extensive testing, including straight-road and cornering scenarios, and demonstrated angular and distance deviations well within specification.
Final performance testing confirmed compliance with radar specifications (range, resolution, field of view, angular accuracy), and the algorithm successfully supported SLAM and perception functions during GNSS outages.
The project was supported by NAVISP Element 2. The slides of the final presentation are available here.