
Real-Time Big Data Processing for GNSS Integrity
Last Updated: 18/12/2023 12:15 Created at: 18/12/2023 12:12
Final Presentation of NAVISP Project EL1-053 BIS now available:
On Monday, December 15th, 2023, GMV NSL Ltd presented the results of the NAVISP EL1-053 BIS project “Real-Time Big Data Processing for GNSS Integrity (RIGOUR)”. Over 50 people from industry and research joined the online event and the following discussion.
Integrity within a Positioning, Navigation, and Timing (PNT) system denotes the reliability of the information it supplies, incorporating timely warnings when navigation usage should be avoided. Current GNSS Integrity Services based on SBAS, GBAS, and RAIM techniques have limitations, such as restricted coverage, assumptions about user local environments, and dependency on specific constellations or redundancy. Advancements in GNSS technology, such as varied signal measurements, easier data access, more efficient data processing, and advanced algorithms, leading to a growing mass-market user basis, have paved the way for innovative Integrity approaches. These new concepts involve global collection of GNSS data by users, processed through a GNSS Integrity Processor (GIP) to produce Integrity Products, enabling users to derive precise positions and error margins.
In this context, RIGOUR’s (Real-time Integrity for GNSS using Opportunistic Receivers) primary objective was to showcase the feasibility and quantify the benefits of implementing real-time big data processing for GNSS Integrity when compared to current Integrity systems. Through comprehensive simulations, the project specifically aimed to leverage extensive data from mass market GNSS users to create satellite and local integrity products. This approach allowed for the evaluation of performance metrics such as position error, statistics concerning Protection Levels (PL) and Safety Index, as well as horizontal and vertical accuracy, while ensuring consistent availability.
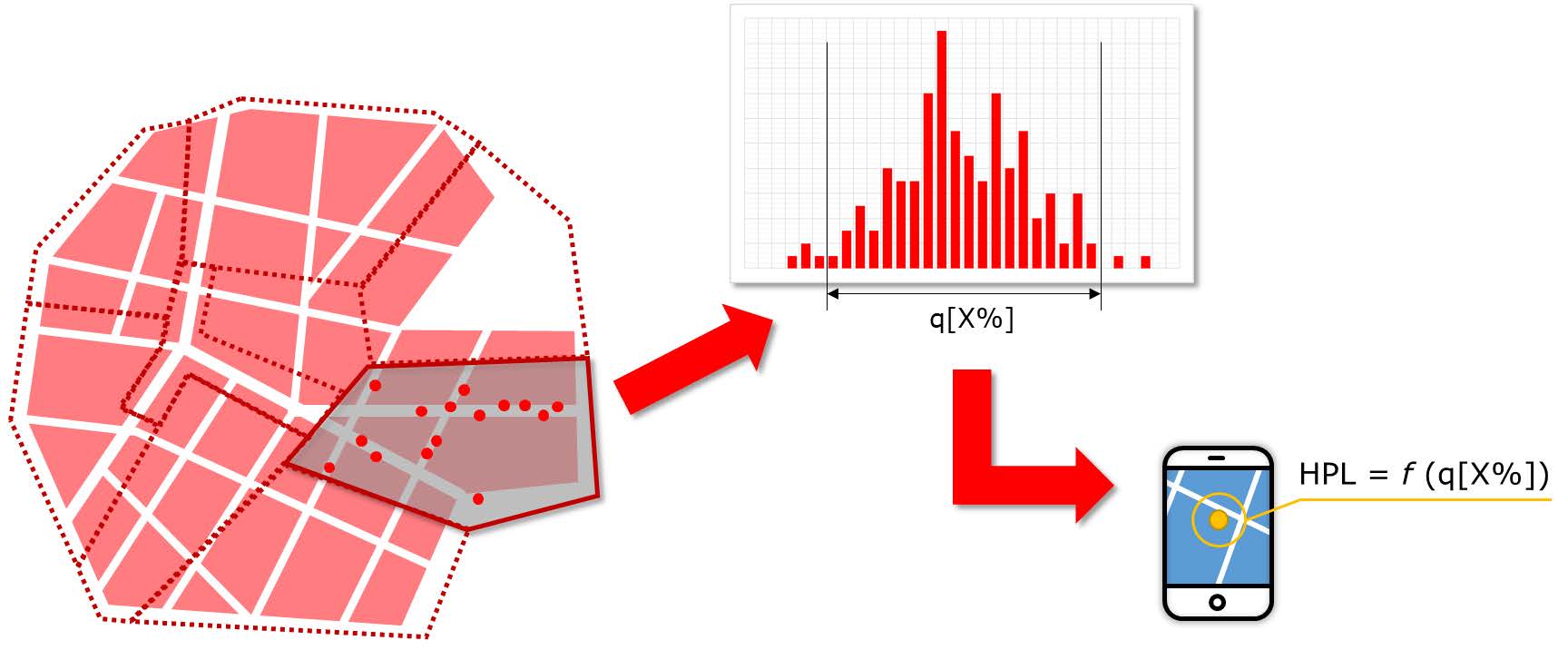
The activity involved evaluating novel GNSS integrity concepts in two key areas: satellite integrity and local integrity. The former emphasizes utilizing widespread GNSS user terminals as the primary data source to generate satellite integrity information via a GNSS Integrity Processor, potentially reducing the need for numerous System high-quality reference stations. Meanwhile, the latter concentrates on providing supplementary information within specific small areas where a high density of GNSS users contributes data to bolster protection levels. This aims to address local environmental factors like multipath and interference, ensuring heightened protection without compromising availability in other regions.
During the project, a demonstrator was designed, consisting of five subsequent models to perform different tasks. The findings at the end of the project emphasize the importance of continuous, low-variance data, the need for different strategies in rural and urban scenarios, the effectiveness of certain modules in protecting against Feared Events, the limitations in addressing specific local environmental errors, and the encouragement of user-level sensor fusion for enhanced integrity. Additionally, assessing the impact of measurement desynchronization and communication failures on algorithms is crucial for robustness and reliability.
The project was carried out in the scope of NAVISP Element 1, which is dedicated to technology innovation of the European industry in the wide PNT sector.
More detailed information can be found in the slides of the Final Presentation.