
Improving ERTMS Application using LIDAR and EGNSS data
Last Updated: 17/01/2023 14:30 Created at: 17/01/2023 11:10
Final Presentation of NAVISP Project EL2 009 now available:
On Wednesday, January 11, 2023, Hitachi Rail STS, together with its consortium partners from the Radiolabs Consortium and RFI SpA presented the results of the NAVISP project “Video Odometry with LIDAR and EGNSS for ERTMS Applications (VOLIERA).” Over 50 people from industry and research followed the interesting presentation and the subsequent interactive Q&A session.
While train control has been mainly based on localization-driven approaches, the automotive sector has addressed autonomous driving based on perception-driven approaches that determine the accurate distances of relevant objects with on-board sensors. In the current ERTMS (European Railway Traffic Management System), the positioning information is provided based on the combination of Odometry system output with the Balises. The Odometry train positioning information relies on the processing of the measurement data coming from the wheel’s sensors. Unfortunately, the accuracy of the wheel’s sensors data is degraded due to slip and slide phenomena. Thus, there is the current need in the railway domain to identify a train positioning system which guarantees high accuracy positioning information without impacting the commercial exercise in case of maintenance activities.
In this context a big effort has been spent in increasing the performance of solutions integrating video cameras, LIDAR, radar, IMU, and ultrasonic sensors, while lowering their cost. Particularly relevant for the extensions to rail are the results achieved in positioning with LIDAR and Visual Odometry. The main advantage of Visual+Lidar Odometry, compared to Mechanical Odometry, is that does not require real-time re-calibration and compensation of non-linear effects as sliding and slipping, usually accomplished on the basis of the detection provided by the Balise Transmission Module.
To this end, a next generation Location Determination System based on the integration of a multi-constellation GNSS receiver with Visual Odometry and Lidar technologies for rail applications was studied. More specifically, the VOLIERA (Video Odometry with LIDAR and EGNSS for ERTMS Applications) project aimed to develop an innovative train positioning system based on the fusion of measurement data coming from these different sensors and technologies that has allowed to address the three different project expected tasks:
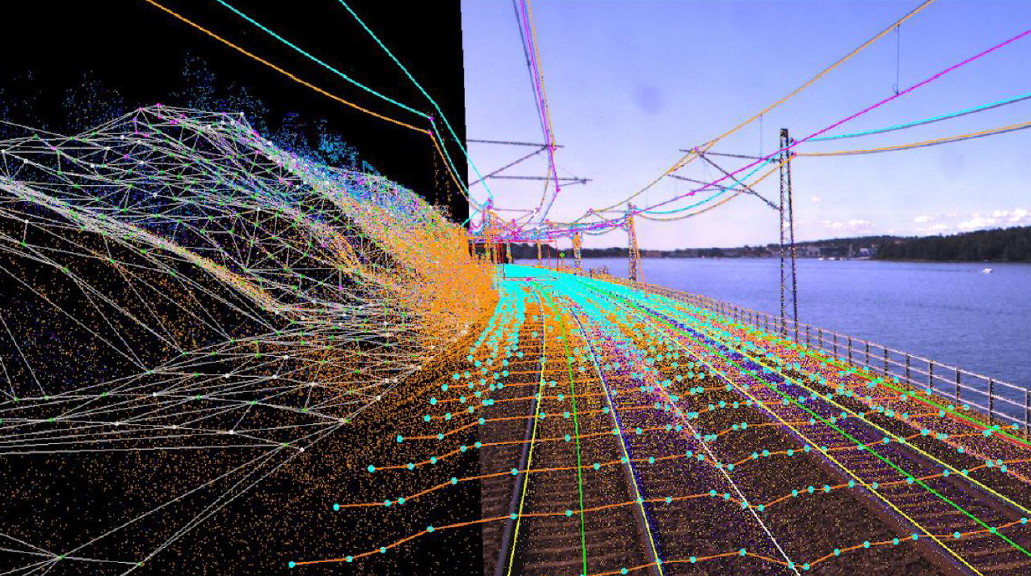
- Track Discrimination, i.e. identification of the track on which the train equipped with VOLIERA system is located. This information has been obtained by processing LIDAR pointcloud data.
- Enhanced Odometry, i.e. combination of train speed and travelled distance. This information has been obtained by processing LIDAR pointcloud data.
- 1D/3D Positioning, i.e. computation of the full train navigation solution. This information has been obtained by processing IMU and GNSS data by means of a tightly coupled Kalman filter
At the end of the project, and thanks to the support of NAVISP, the VOLIERA project developed a solution capable of satisfying the customer's need for highly accurate train positioning information through sensor fusion, i.e., a set of techniques that allows to compute a robust solution for complete train navigation by combining measurement data coming from different sensors. In addition, there is no longer a need to correct the positioning data using the balises, since the accuracy of the train positioning information is improved by the fusion algorithm.
VOLIERA was thus able to verify various PoCs (Proof of Concept) with real railway data and achieved promising results. In a next step, the aim is to further improve the Ground Truth identification and time synchronization while also performing extensive field tests to collect large amounts of measurement data to verify and validate the PoC’s. Moreover, a VOLIERA Phase II is under current discussions with in the NAVISP Programme to further work in this promising area.
The project was part of NAVISP Element 2, which aims to maintain and improve the capabilities and competitiveness of the participating States' industry in the global market for satellite navigation and, more broadly, PNT technologies and services.
More detailed information can be found in the slides of the Final Presentation.